This function lets you compose transformations based on a sequence of linear
transformations. If the transformations are parameterised the parameters will
become arguments in the transformation function. The transformations are
one of rotate, shear, stretch, translate, and
reflect.
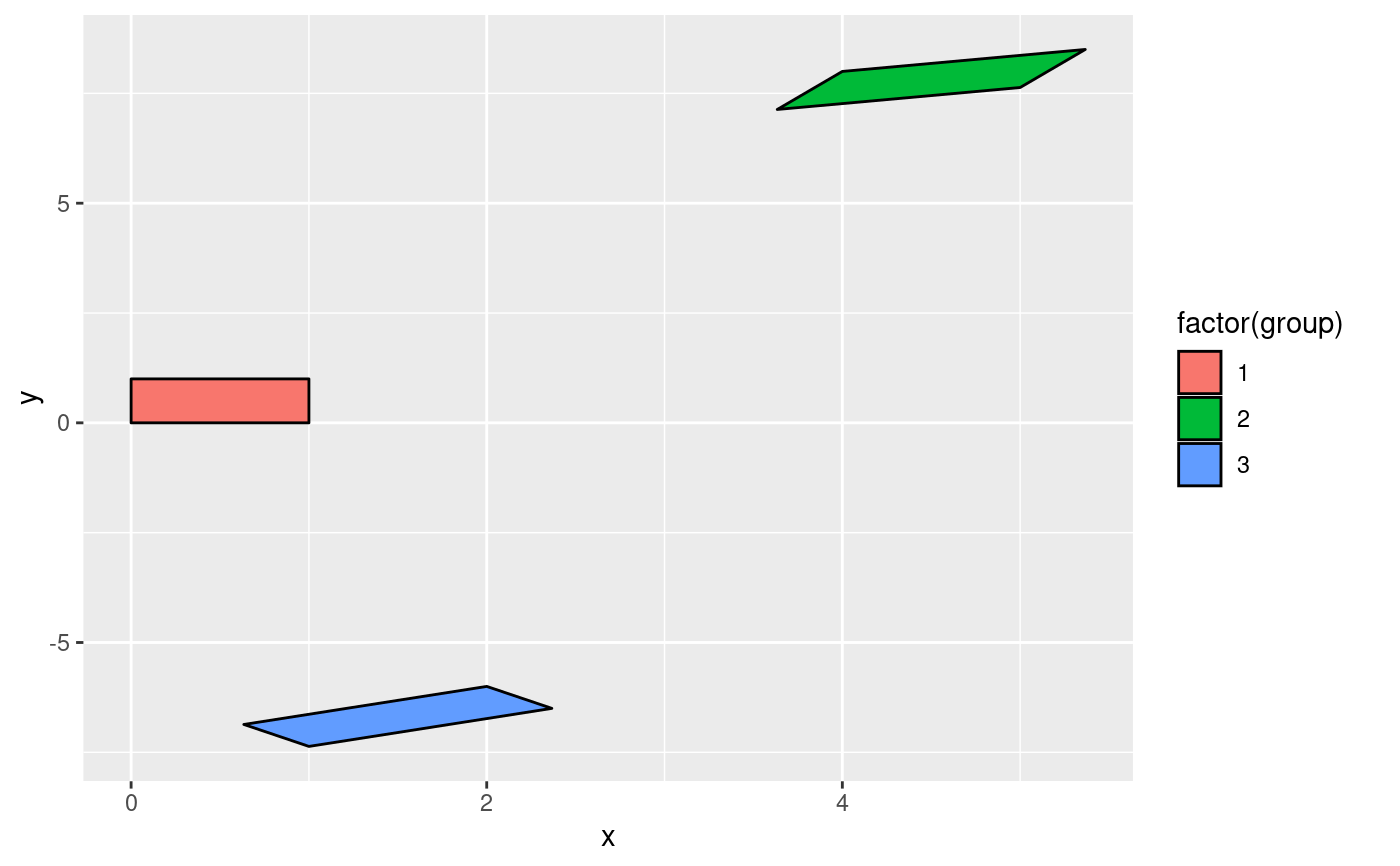
Examples
trans <- linear_trans(rotate(a), shear(1, 0), translate(x1, y1))
square <- data.frame(x = c(0, 0, 1, 1), y = c(0, 1, 1, 0))
square2 <- trans$transform(square$x, square$y, a = pi / 3, x1 = 4, y1 = 8)
square3 <- trans$transform(square$x, square$y, a = pi / 1.5, x1 = 2, y1 = -6)
square <- rbind(square, square2, square3)
square$group <- rep(1:3, each = 4)
ggplot(square, aes(x, y, group = group)) +
geom_polygon(aes(fill = factor(group)), colour = 'black')